复刻人类皮肤源于自然演化的高级感知功能,是电子皮肤、机器人等前沿科学技术领域长期追求的目标。为此,科学家们开展了大量研究工作,并取得了丰硕的成果。然而目前,尚未有电子皮肤能够复现人体皮肤中机械感受器的细微观三维空间分布形式,进而像皮肤一样,在物理层面实现压力、剪切力、应变等多种机械信号的同步解耦感知。
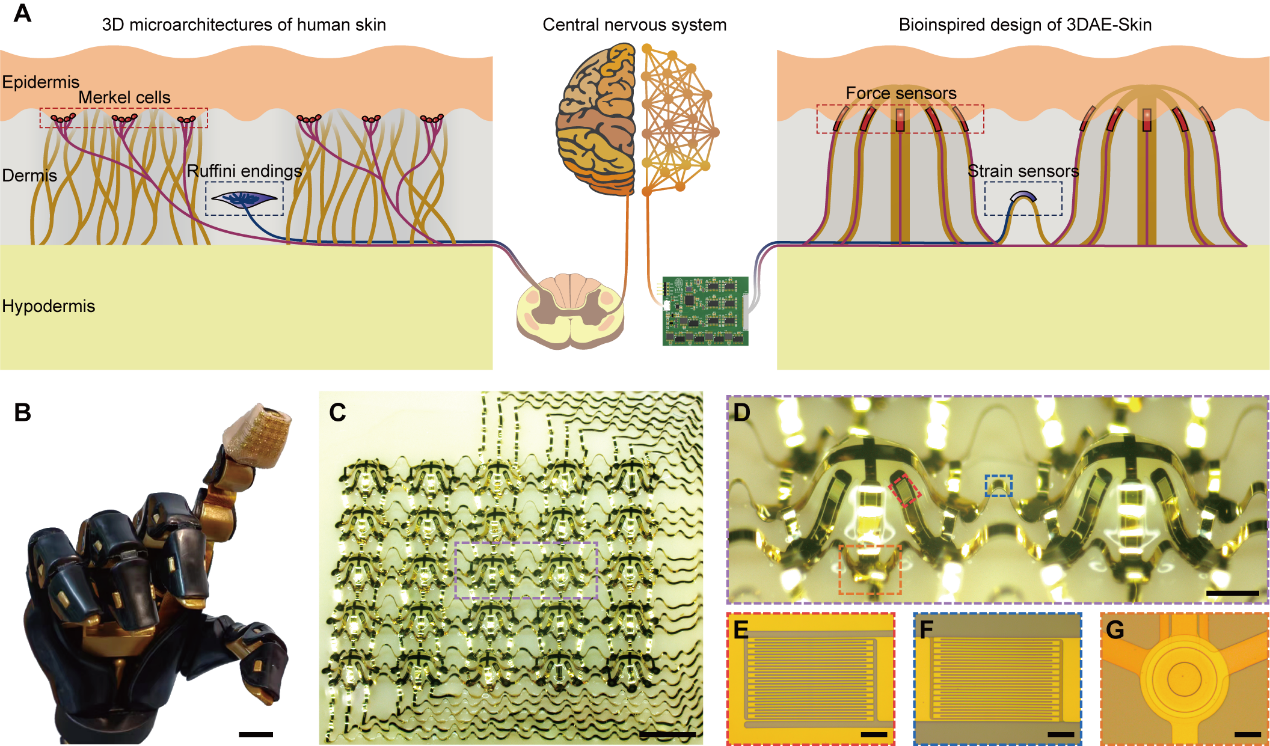
图1.具有三维架构的电子皮肤:仿生设计概念及真实器件图片。A图展示电子皮肤的仿生设计概念;B图为贴于机械手指尖的电子皮肤;图C-G为电子皮肤的照片、力传感单元与应变传感器局部放大图及应变栅线与过孔局部显微放大图片
近日,受人类皮肤中机械感受器空间分布形式的启发,清华大学航天航空学院、柔性电子技术实验室(柔电国重)张一慧教授课题组提出了一种具有三维架构的新型电子皮肤设计概念,其结构中的力与应变传感器的三维分布效仿了人类皮肤中梅克尔细胞(Merkel)和鲁菲尼氏小体(Ruffini)的空间分布形式,使该器件能够从物理层面解耦地测量压力、剪切力和应变(图1)。与皮肤结构类似,该三维电子皮肤也由“表皮”“真皮”和“皮下组织”组成,且各层的有效模量与人体皮肤中的对应层相近。传感器及电路主要位于“真皮”层中,其中,力传感单元设计为八臂笼状结构,传感器位于笼状结构上部,更靠近电子皮肤表面,因而对外部作用力高度敏感;应变传感器位于器件底部的拱形结构上,在垂直高度上与力传感单元上部的传感器保持一定的距离,因此只对面内的拉伸应变敏感,几乎不会受压力的干扰。
课题组基于这种具有三维架构的电子皮肤,结合深度机器学习算法,研制出只需通过触摸便可同时测量物体模量及局部主曲率的先进触觉系统(图2),展示了其在判别食物新鲜程度等真实场景中的应用,并深入探讨了其在物理量定量测量(如摩擦系数等)、人机交互等重要领域的应用潜力。
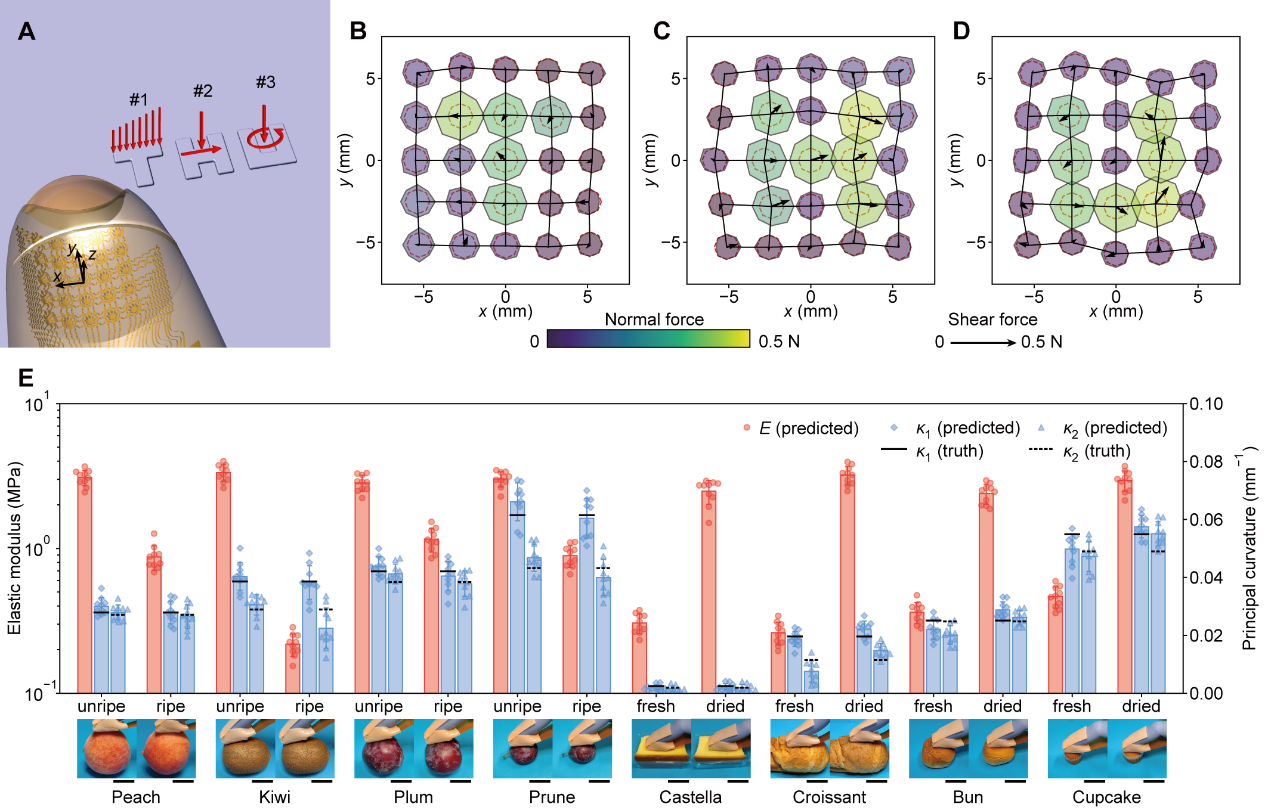
图2.基于新型电子皮肤器件研制的触觉系统:时空映射与模量曲率定量测量。图A-D为时空映射图;图E为利用该触觉系统测量食物、水果模量与曲率的实验图片及测量结果
5月30日,相关研究成果以“仿人类皮肤机械感知功能的三维架构电子皮肤”(A Three-Dimensionally Architected Electronic SkinMimicking Human Mechanosensation)为题,在《科学》(Science)发表。
张一慧为论文通讯作者,清华大学航天航空学院2018级博士生刘志、2021级博士生胡笑男和柔性电子技术实验室副研究员柏韧恒(航院已出站博士后)为论文共同第一作者。论文作者还包括航天航空学院2023级博士生羊佑舟、2020级博士生徐世威、2019级博士生沈张明、2017级博士生程旭(现为新加坡国立大学博士后),以及航天航空学院博士后庞文博、刘卿、王月皎、王书恒。研究得到科学探索奖、国家自然科学基金委原创探索计划项目与创新群体项目等的资助。
论文链接:
https://www.science.org/doi/10.1126/science.adk5556

