9月7日,清华大学柔性电子技术实验室、航院张一慧教授课题组发表阐述三维柔性电子器件的力学引导组装方法的综述文章。该文章以器件的结构与功能为主线,从力学组装原理出发,系统总结了面向三维柔性电子器件制造的力学引导组装方法,综述了三维柔性电子器件在生物/医疗、电磁、能源、光电、机器人等众多领域的应用,并对力学引导三维组装方法的现有挑战及发展方向进行了分析与展望。
三维柔性电子器件在生物学、医学、能源、机器人、健康监测等领域具有重要应用价值。力学引导的三维组装方法通过利用先进材料及结构力学原理,将器件构型由平面转为三维。该方法具有材料/尺度适用范围广、成型后可再变形、可兼容平面加工工艺等优势,是三维柔性电子器件的核心制造方法之一。
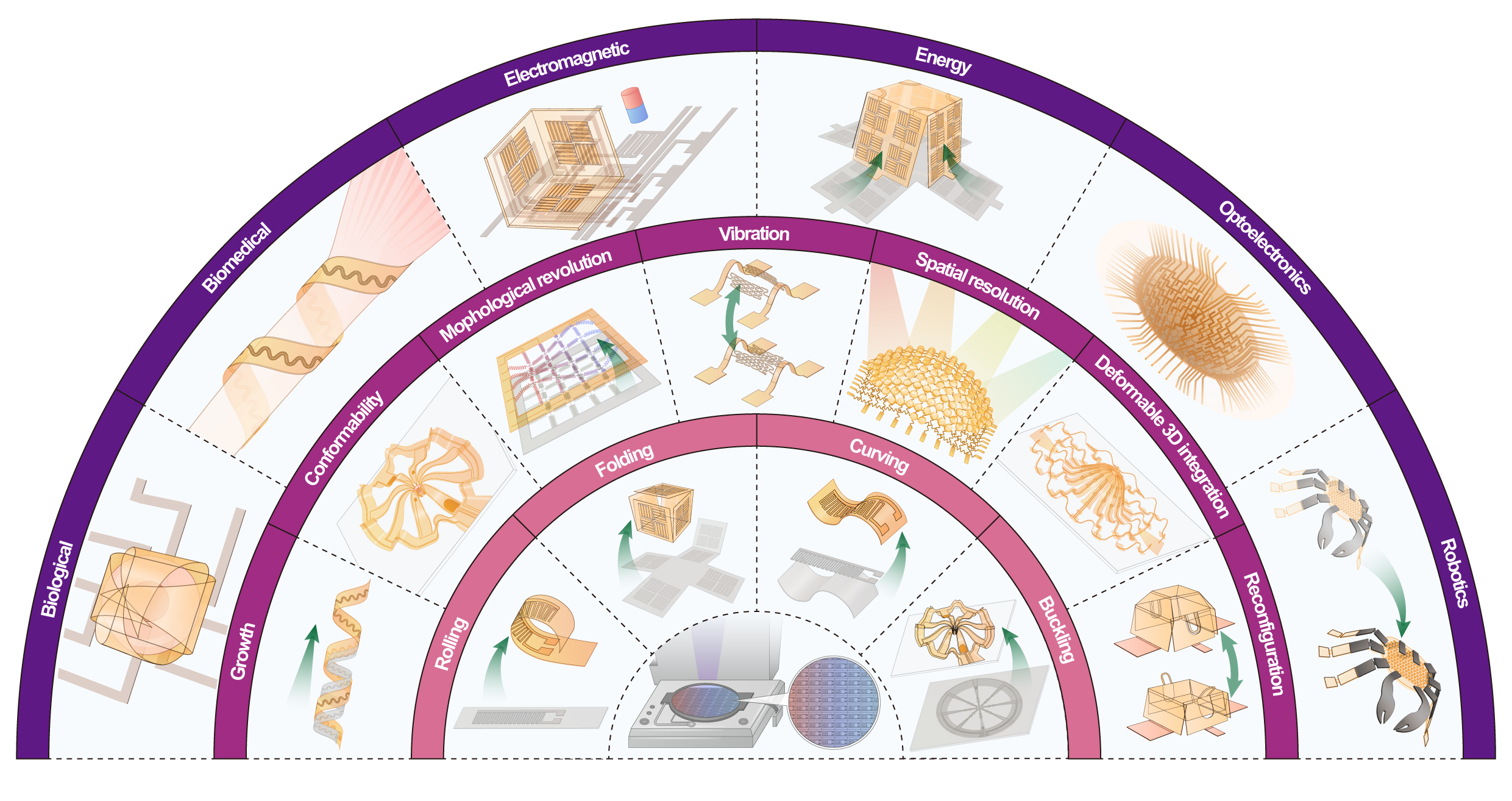
图1.三维柔性电子器件的力学引导组装方法。内圈为四种三维组装方法:弯曲组装、折叠组装、共形组装和屈曲组装;中圈为器件的结构性功能;外圈为三维柔性电子器件在生物/医疗、电磁、能源、光电、机器人等领域的应用
该文章基于变形模式的区别(图1,内圈),将现有的主要力学引导三维组装方法分成四大类(即卷曲、折叠、共形及屈曲组装),并分别进行了全面总结。随后,文章对三维柔性电子器件的两个核心组成部分(即互联导线与器件主结构)进行了全面回顾。基于上述内容,文章深入分析总结了三维柔性电子器件所特有的多种结构性功能(即三维集成与空间分辨率、能量收集、三维共形电子界面及自生长/可重构/结构演化)(图1,中圈和图2),并回顾了三维柔性电子器件在生物/医疗、电磁、能源、光电、机器人等众多领域的应用(图1,外圈)。最后,文章分析了力学引导的三维柔性电子器件组装方法所面临的挑战及其未来发展方向。
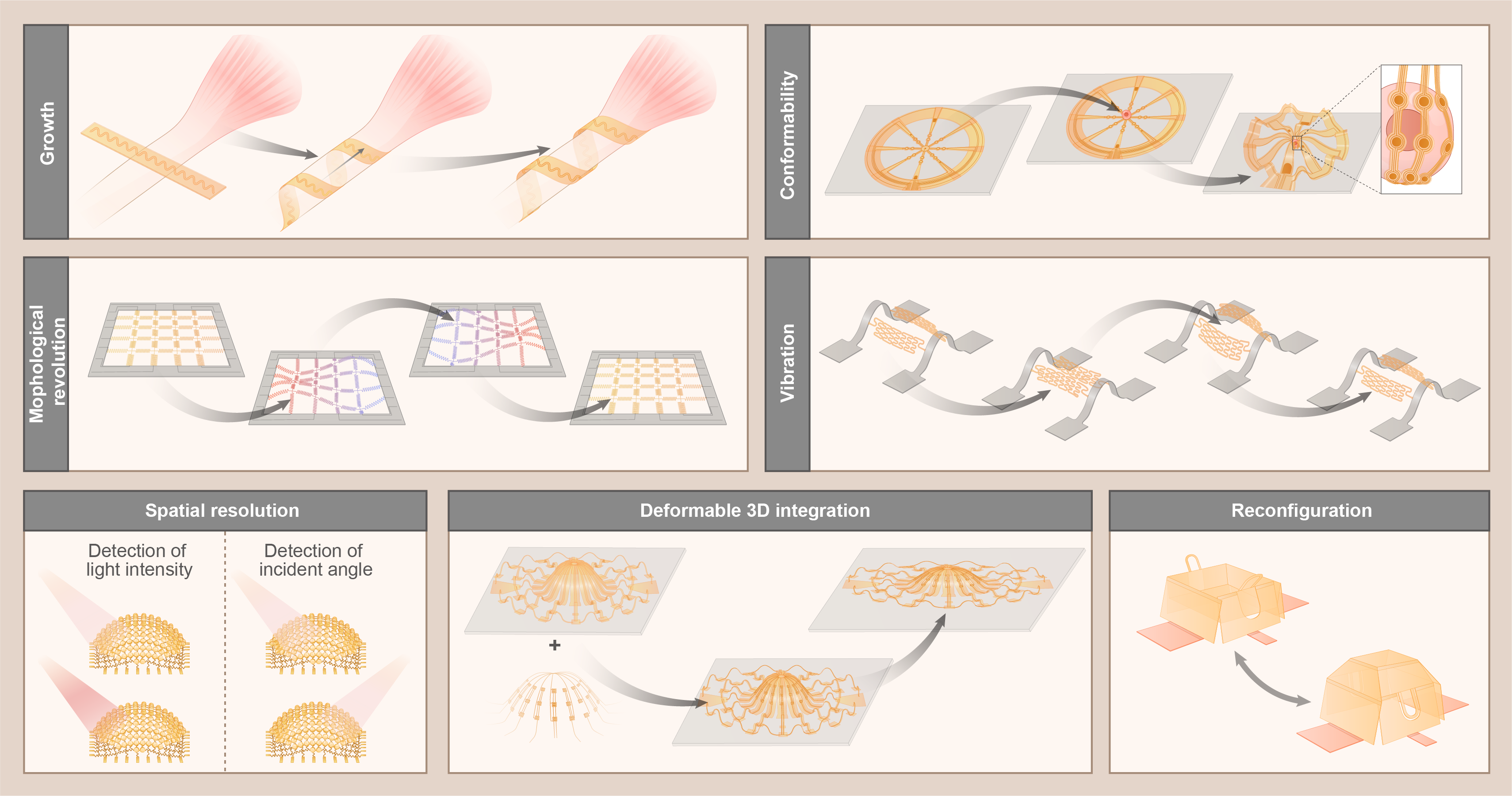
图2.三维柔性电子器件的结构性功能
张一慧课题组长期致力于三维微纳结构组装、软物质与柔性结构力学等领域的研究,提出了利用屈曲力学实现三维微结构组装的原创思想,建立后屈曲分析的双参数摄动展开理论和三维组装的逆向设计方法及实验技术,形成了一套适用于各种高性能材料和复杂几何拓扑的微结构及电子器件三维组装方法体系。在此基础上,研制出仿视网膜三维电子细胞支架、多步态微型攀爬软体机器人、仿风传种子三维微电子飞行器、心脏共形电子器件等多种具有新功能的电子器件及微系统。自2015年以来,相关成果发表于《科学》《自然》《自然综述·材料》《自然材料》《自然·电子》《科学机器人》《固体力学与物理杂志》等国际学术期刊。
近日,该文章以“三维柔性电子器件的力学引导组装方法”(Mechanically-guided 3D assembly for architected flexible electronics)为题发表在《化学评论》(Chemical Reviews)期刊上。
清华大学柔性电子技术实验室、航院张一慧教授是该文章的通讯作者。清华大学航院博士后柏韧恒、2020级博士生徐世威和2023级博士生羊佑舟为文章的共同第一作者。本工作得到国家自然科学基金委、新基石科学基金会所设立的科学探索奖、清华大学信息科学技术国家实验室、清华大学国强研究院基金、中国博士后科学基金等的支持。
论文链接:
https://pubs.acs.org/doi/10.1021/acs.chemrev.3c00335

