航天航空学院启航创新实践营,是同学们通过进行具有比赛性质的有功能的实物或系统的创新设计与制作,如无动力遥控滑翔机模型、仿生机器鱼、微型飞行器与智能机器人(与自动化系合作)等实践课题,获得综合性全过程的文献学习、模型建立、创新设计与制作,以期提高同学们的创新实践思维,是航院创新本科生实践教学体系的一个重大举措。自2019年开始举办,今年正式更名为“启航创新实践营”(课名),并设计制作了新的营旗和记录本。
今年有76名航院大二本科生参加了4个竞技类项目的创新设计与制作(航模、仿生水下机器鱼、智能微型飞行器与智能机器人)以及5个自由项目,其中智能机器人项目联合电工电子实验教学中心的任艳频老师团队共同指导。这是航院本科生教学环节中十分重要的一环,各位同学在为期一个月的实践中都有很大的收获,作品涵盖了航空、力学、热学、材料学、群体智能等多个领域。
经过严格的教学管理和严谨的教学考核(开营、中期考核、结营汇报),在老师们与同学们的共同努力下,在学校教务处实践科、学院教学办与国家级力学示范中心的指导与支持下,历时五周的创新实践营落下了帷幕,同学们获得了创新思维与实践能力的提升,收获颇丰,实践的作品获得了现场老师们的高度评价。
航模的创新设计与制作
·基于CADC比赛的限距载重空投航模的创新设计与制作
CADC比赛,全称为中国国际飞行器设计挑战赛,是由国家体育总局、教育部和科技部联合主办的赛事,旨在提高学生身体素质的同时,结合相关科研任务,进一步挖掘、拓展高校学生及科研院所相关人员的科技创新能力,为培养航空工业和国防后备力量搭建一个发掘创新人才、检验创新作品的平台。限距载重空投是该赛事的一个项目,要求遥控电动模型飞机搭载一定质量的载荷从起降区起飞,飞行至任务区上空一定高度后将载荷投放,模型飞机安全返场,完成比赛任务。比赛以装载质量大、投放准确取胜。在本届创新实践营中,同学们在限距载重空投项目上又取得了新的突破,例如引用自定义坐标地图,结合GPS坐标定位,可以精确指引飞机到靶标坐标;克服清华校园无飞行试飞场地的困难,试验室搭建仿真试飞环境,无需外场试飞就可以检验大量源代码的逻辑问题等。该项目荣获启航创新实践营“团队金奖”。

·基于CADC比赛的对地侦察与打击航模的创新设计与制作
对地侦察与打击项目是中国国际飞行器设计挑战赛的一个比赛项目,来源于近年来发展迅速的察打一体无人机。比赛要求参赛飞行器可以在4分钟内快速部署,能以自动驾驶模式识别地面目标,并对特定目标投掷指定载重物。清华大学学生航空创新实践基地在自动驾驶方面的技术积累比较匮乏,也从未在该项目上取得名次。在本届启航实践营中,CADC对地侦察与打击团队完成了比赛飞机设计,成功实现了自动驾驶,并在航电设备、ROS环境、图像识别和建模仿真等方面进行了大量研究,积累了丰富的经验。虽然团队在这个项目上已经迈出了一大步,但距离完全实现比赛要求,团队还有很多工作有待完成。团队会继续艰苦奋斗,争取登上2022年CADC比赛的舞台。该项目荣获启航创新实践营“最佳实践奖”。

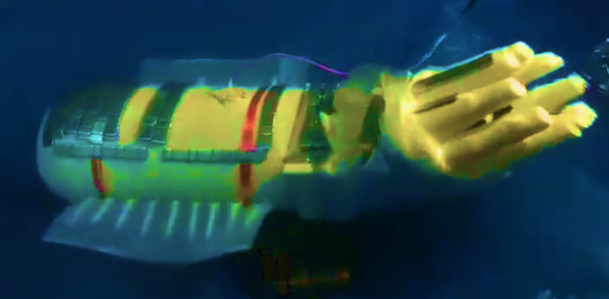
仿生机器鱼的创新设计与制作
仿生机器鱼是以仿生为主题的新型水下探测器,应用于海洋资源保护利用、水下作业、军事侦查等,在推进效率、机动性等方面具有巨大的研究价值。第三届启航创新实践营仿生机器鱼组学生结合流体力学、仿生学以及机器人技术研制出四款样机:企鹅、炮弹鱼、仿生进食机器鱼、乌贼。湖边往来人,但爱仿生鱼。秋日的清华园荷塘,因仿生鱼而增添了一份灵动。万物以自然为性,道法自然。每一种水生生物都给予我们新的灵感,通过仿生为水下航行器的设计带来灵感,水下航行器的研究困境以期在自然界生物上得到解决。
·仿生企鹅组创新设计与制作
仿生企鹅组创新设计制作的一款扑鳍式推进的仿生机器企鹅,属于国内首款企鹅样机。该组在实现直游、变速、转弯、倒游、上浮下潜等多种游动模态的基础上,实现了机动性的提高、防水工艺的优化以及中枢模式发生器(CPG)控制的创新目标,荣获启航创新实践营“团队金奖”。



·仿生炮弹鱼组创新设计与制作
仿生炮弹鱼组创新设计制作的一款背臀鳍推进的仿生机器炮弹鱼,属于首款炮弹鱼样机。该组采用长鳍波动式的推进模式,实现单电机控制的鱼体波模拟,具有较好的机动性能与较高的推进效率,实现了最优设计与最佳仿生效果,荣获启航创新实践营“最佳实践奖”。


·仿生进食机器鱼组创新设计与制作
仿生进食机器鱼组创新设计制作了一款基于负压原理的进食机器鱼。该样机的进食功能完全仿照鱼类的吸食动作:弹性膜模拟咽部运动、合页带动嘴部运动、单向阀模拟鳃部,实现了与真正鱼类进食相似的仿生进食。
·仿生乌贼组创新设计与制作
仿生乌贼组创新设计制作了一款鳍波动与喷射融合推进的仿生机器乌贼,实现了基于胸鳍控制的直行、转弯、倒游、上浮下潜的基本运动模式以及基于水泵辅助的高机动推进模式。

智能微型飞行器的创新设计与制作
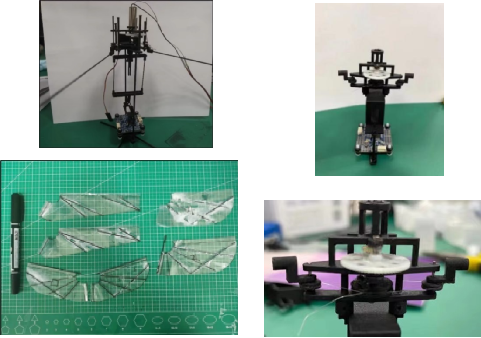
·仿生蜂鸟的飞行器创新设计与制作
蜂鸟是世界上最小的鸟类,飞行方式和大多数鸟类不同,通过前后高频率的扑翼来实现飞行和空中悬停,这也是类蜂鸟飞行器拟实现的设计目标。今年本项目在去年的项目基础上进行了改进和创新,主要目标为优化机翼设计、实现轻量化和尝试绳传动机构。在机翼设计方面,项目组选择了更为合适的膜材料,使得单片机翼质量更轻,柔性更好。同时,项目组设计了多种机翼形状,并分别测试其升力。结果显示不同机翼的最大升力都是10g,且部分机翼明显未达到最高扑动频率,项目组判断原因是电机马力不足。在机架设计方面,项目组设计了两种方案,相比上届成品,总质量分别下降了36%和51%,实现了轻量化的目标,但可惜升力因为电机问题未达到预期,无法起飞。项目组所设计的两个方案都采用了绳传动机构,并测试了相同电压下连杆机构和绳传动机构的扑动频率,发现绳传动机构频率要快将近一倍,证明了绳传动机构的优越性。
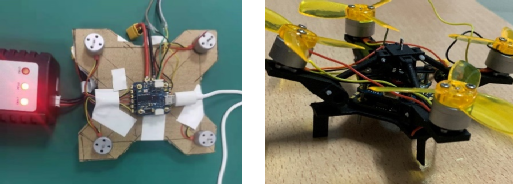
·微型四旋翼飞行器的创新设计与制作
微型飞行器具有重量轻、尺寸小、便于携带、隐蔽性好等性能特点,由于其具有的特殊的飞行性能以及应用前景,正受到越来越多的各国军方和民用部门科研人员的重视。作为微型飞行器中十分具有代表性的一种类型,微型四旋翼飞行器在军事及民用领域均展现出了广阔的应用前景。在军用方面,微型四旋翼飞行器具有良好的隐蔽性,可随时随地起飞,可担负侦察与通讯等任务;在民用方面,微型四旋翼飞行器可提高抢险救灾时的搜索精度,可以对危险地带以及人类难以进入的狭小环境进行探查,依靠其尺寸小、易控制的优点完成较为困难的任务。也正是由于其较轻的重量和较小的尺寸,其抵抗侧风的能力不佳,易发生偏航,通过改变不同电机转速来实现姿态调整效率偏低。基于这一不足,小组设计了可倾转旋翼式的四旋翼飞行器,四个旋翼通过电机带动传动机构实现同步倾转,遇到侧风时旋翼由水平转为倾斜,通过倾斜所产生的水平方向分力抵抗侧风的影响,实现姿态稳定的目的。
智能机器人的设计与制作
智能机器人项目组充分围绕“智能”的定义,即:能够实现高级抽象的行为和功能(可分为执行感知-分析-执行闭环的个体智能和群体智能)制定了两个方向,分别是个体智能的深脑药物递送机器人和集群/围猎群体智能机器人。
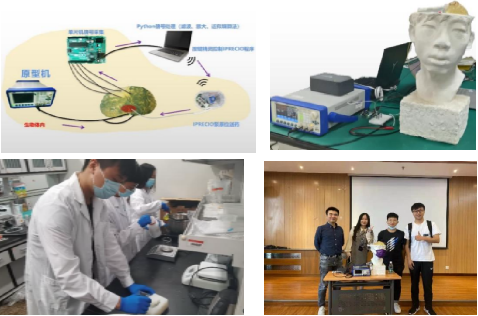
·深脑药物递送机器人
人脑是结构非常复杂、功能极其完善的器官,脑疾病是人类面临的重大健康问题,多数脑疾病尚无有效安全的治疗方法,大量的潜在药物无法直接跨越血脑屏障在脑部发挥作用,发展可植入的药物智能递送系统已成为人类的迫切需求。感知并采集不同脑疾病中的脑电信号特征,通过判断、处理、分析脑电信号,执行实现脑部药物的原位递送指令,将药物精准可控地递送到特定脑区,构建“感知-分析-执行”闭环智能药物递送体系,实现脑疾病的治疗。团队成员共8人,分成两组,基于信号发生和采集装置、微型泵搭建智能原型概念系统,实现了基于大脑皮层信号的智能药物递送和基于深脑信号的智能药物递送。
·群体智能机器人
自然界中存在着大量的群体智能现象,小到蚁群大到鸟群,在该体系中不存在位于中心节点的控制中枢,个体之间通过局部的信息交流实现分布式的系统控制,从而能完成复杂的编队、围捕等功能,这就是群体智能。群体智能有着可拓展性强,鲁棒性高等特点。基于此而诞生的仿生群体智能系统在未知环境探索搜救、集群打击等方面有着广阔的应用前景。团队成员共9人,分成两组,通过对全向运动的可编程智能机器车进行深度开发,实现了对动态猎物小车的集群围猎与自组织的群体聚集和定向迁徙行为。其中“对目标进行追捕环绕的去中心化群体智能机器人”荣获了本届启航创新实践营“最佳创意奖”。


在自由题目中,有的同学们组团进行基于柔性应变传感的人体动作感知技术的实践创新,有的进行了面向能量优化飞机的能量和热管理一体化分析软件的开发,有的同学进行了热–力耦合的双稳态余弦梁的研究、基于深度强化学习对偏微分方程及多边形涡流现象的研究 以及基于深度学习的飞行器识别与设计。因为疫情缘故,海外留学生们在驻地进行了线上启航创新实践营课程的学习,在线下进行了无动力滑翔机的航模制作,并通过视频汇报其设计与制作作品。

